Overview
I designed and built a competition robot for Harvard’s Turf Wars robotics challenge, focused on collecting and scoring game pieces into an elevated hoop. The project emphasized mechanism design, drivetrain performance, and reliable actuation under strict geometric and material constraints.

The Challenge
The competition required designing a robot capable of collecting tennis balls and hockey pucks and scoring them into a raised basket while competing head-to-head against another robot. The arena included ramps and elevation changes, requiring both mobility and vertical reach.
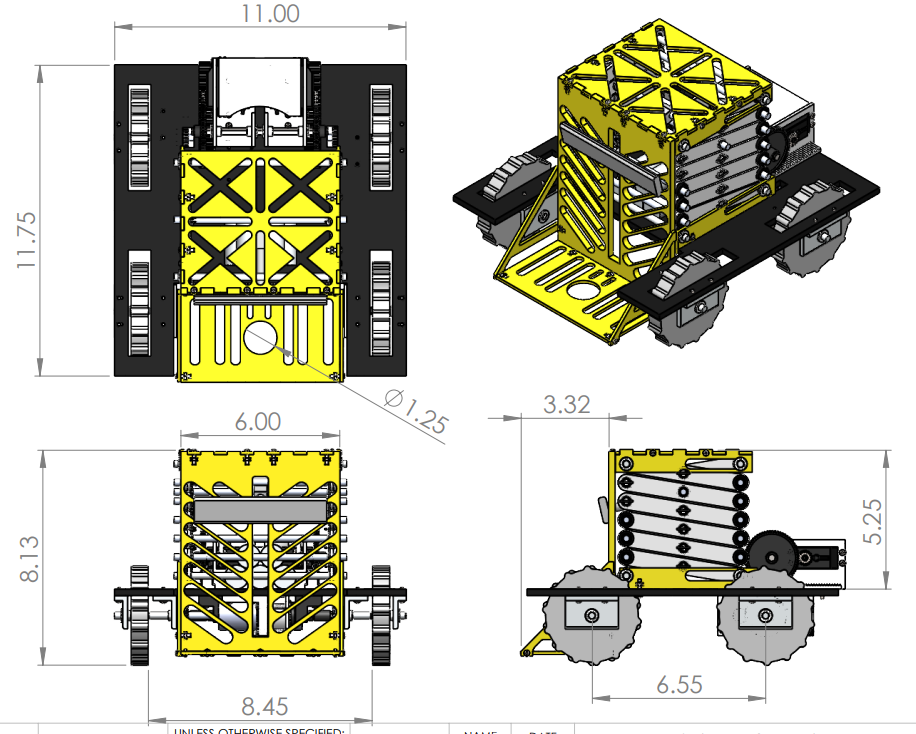
The robot had to fit within a 12-inch cube at the start, climb 15° and 30° ramps, and operate within strict limits on materials, motors, and fabrication resources.
Design Requirements
The robot needed to reliably intake game objects, transport them across the arena, and deposit them into an elevated hoop. This required a compact design capable of both horizontal mobility and vertical extension. Mechanisms had to be simple, robust, and synchronized, as failure in any subsystem would compromise the entire robot.
My Focus: Mechanism & System Design
I worked on the mechanical design and system integration of the robot, contributing to concept selection, CAD development, and iterative refinement of key mechanisms, particularly the lifting and scoring system.
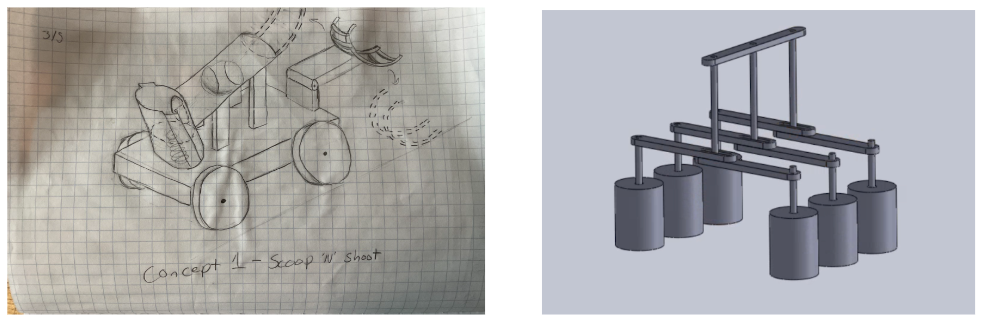
Concept Development
We evaluated multiple concepts, including a shooting mechanism, a gripping system, and a lifting scoop design. While shooting offered speed, it introduced significant uncertainty in accuracy and control.
We ultimately selected a scissor-lift “extendo-scoop” concept, prioritizing precision and reliability over speed. This design allowed controlled placement of objects directly above the hoop rather than relying on projectile motion.
Final Design
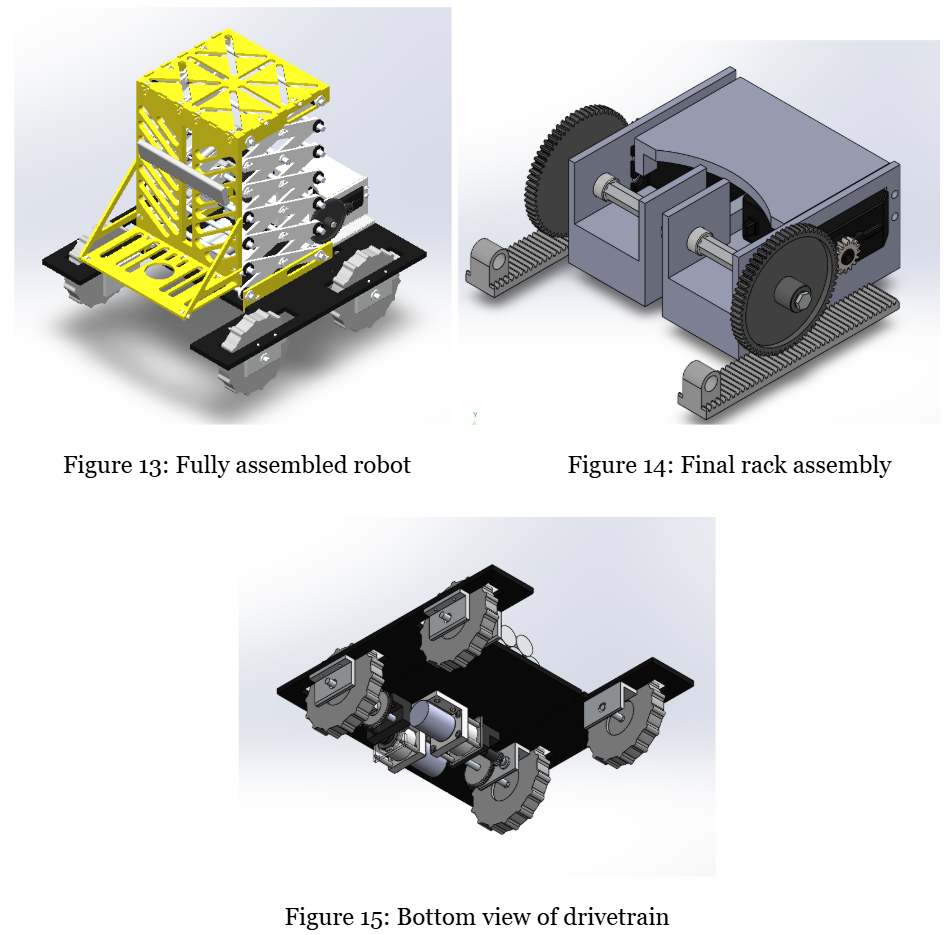
The robot consisted of four integrated subsystems: a drivetrain, a scissor-lift mechanism, a front-mounted scoop, and a passive pusher.
The drivetrain used a rear-wheel-drive configuration powered by gearboxes, enabling stable traversal of ramps and tight maneuvering within the arena. The scissor lift provided vertical extension, allowing the robot to raise collected objects above the hoop.
A scoop at the front collected balls and pucks, while a mechanically linked pusher used the motion of the scissor lift to eject objects into the goal without requiring additional motors.
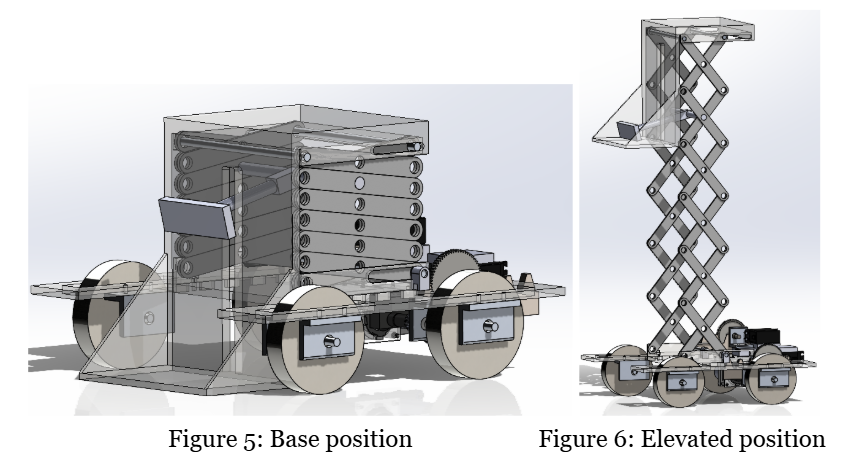
Key Engineering System: Scissor Lift Mechanism
The most complex challenge was designing a reliable lifting system. The scissor mechanism required both sides to move synchronously; any mismatch would cause binding or structural failure.
To solve this, we designed a rack-and-pinion system driven by two servos with a 4:1 gear ratio. Rotational motion from the servos was converted into horizontal motion, which then translated into vertical lift through the linkage system.
A shared shaft helped synchronize both sides, ensuring coordinated motion and preventing misalignment during operation.
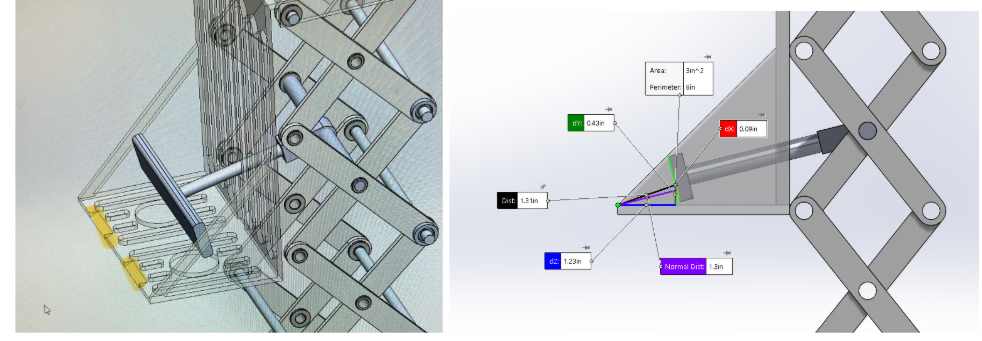
Passive Scoring Mechanism
Rather than adding complexity with additional actuators, we designed a passive pusher integrated into the scissor linkage.
As the lift extended, the geometry naturally advanced the pusher forward, ejecting the ball or puck at the correct height. This reduced system complexity while ensuring consistent scoring behavior.
Challenges
Synchronization between the two servos proved difficult, particularly under load. While torque calculations indicated sufficient lifting capacity, small timing differences caused instability when lifting heavier objects like hockey pucks.
Additionally, the scissor mechanism introduced a tradeoff between simplicity and speed. While reliable, it required full extension and retraction for each scoring cycle, slowing overall performance.
Outcome
The robot successfully met all design constraints and consistently scored tennis balls during competition. It placed 3rd out of 6 teams, scoring in three of four matches.
While the system struggled with heavier hockey pucks due to synchronization limitations, it demonstrated strong reliability and effective execution of its core design strategy.
Reflection
This project reinforced the importance of mechanism simplicity, synchronization in multi-actuator systems, and designing around real-world failure modes rather than ideal calculations.
It also highlighted a key engineering tradeoff: designs optimized for reliability and precision may sacrifice speed and peak performance